|
HEXAPODS
|
|
|
Robots are working all over the world almost every day to make the lives of humans easier. Since the advent of microprocessors and computers, the possibilities for Robots to improve our civilisation are that much more.
We already have robot factories churning out cars to a higher standard, than those produced in manned factories. Simple domestic robots are finding their way onto the market to relieve us of tedious tasks. This is sure to mean more complex robots will be designed and become cheaper, to in turn, free humans more and more from everyday chores. Put this emerging technology together with renewable energy, such as solar cells, and the possibilities are endless. Not only could the world rely on plentiful renewable energy, but we'd have more time to devote to other problem areas in our society. We could build a higher society where food, energy, healthcare and transport are available to all.
For the above reasons I believe that we should encourage our children to become the engineers of tomorrow, to build on the current state of the art, to produce practical robotic solutions for our future. NK
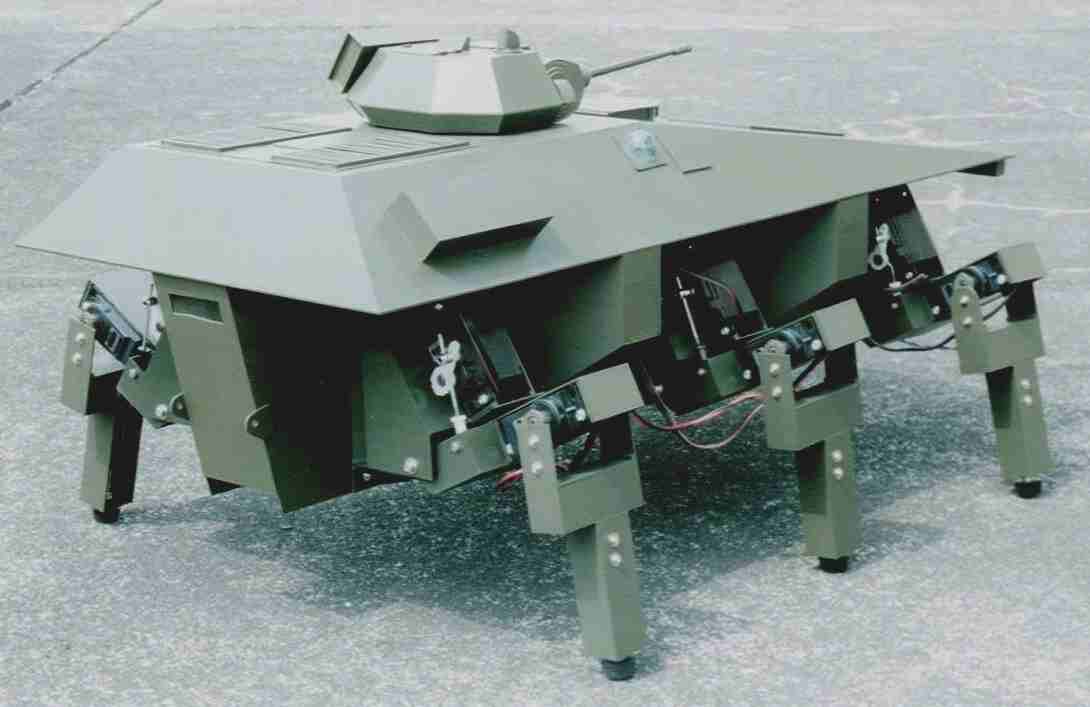
The term commonly refers to robots biologically inspired by Hexapoda locomotion. Hexapod robots are considered to be more stable than bipedal robots because in most cases hexapods are statically stable. Therefore, they do not have to depend on balance mechanisms, although, for a smoother walk, feedback and positive reaction will count for much.
Stewart platforms should not be confused with hexapods in the sense of a kind of six-legged walking robot. A Stewart platform, is a kind of parallel manipulator using an octahedral assembly of struts.
Hexapod robots are considered to be more stable than bipedal robots because in most cases hexapods are statically stable. Therefore, they do not have to depend on real-time controllers for standing or walking. Nonetheless, it has been demonstrated that at high walking speeds, insects do depend on dynamic factors.
Biologically Inspired
Hexapod
Walker Robot
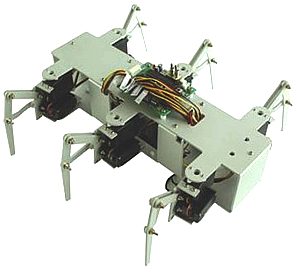
Hexapod Walker Robot is quite similar in mechanism as quadruped walker robot, but it has 2 more legs of each 2 degree of freedom. (i.e., totally 6 legs and 2 degree of freedom for each leg) And consequently, 4 more servo motors are equipped. (12 servo motors in total) This robot delivers more stable and natural walking action than quadruped robot. By experiencing this product, users can understand and learn about the moving or walking algorithm. Besides, by using extension module such as proper sensors, etc., you can diversify its movement. That is, if you adopt some sensor module in it, then, the robot moves forward avoiding collision against front obstacles or tracing after some specific objects. Users also can make their own program or modify supplied program with ease.
Features
http://dajin.en.ec21.com/product detail Hexapod Walker Robot
BIPEDS | HEXAPODS | OCTOPODS | QUADRUPEDS | TRIPODS
LINK and REFERENCE
WATERBORNE (MARINE) ROBOTS
ACORE - American Council on Renewable Energy ASV Global - C-Worker unmanned surface vessel for safer offshore surveys AUTONAUT - MOST (Autonomous Vessels) Limited - wave propelled system AUVSI - ROBOBOATS - Association for Unmanned Vehicle Systems International ARDUINO - Hobbyists computer platform for interactive robots and machine prototyping - Open source BAE Systems - Maritime, Naval ships and submarines BEAGLEBONE - ARM low cost robot friendly, low drain micro computer BLUEBIRD - Electronics - BLUEFISH ZCC - Bluebird Marine Systems' autonomous unmanned fleet development program BLUE OCEAN - Rolls Royce autonomous cargo vessels project Captain Kidd's robot sailboat project - Microtransat CDE - Centre for Defence Enterprise CMTI - Centre for Maritime Technology and Innovation - Autonomous Study DARPA - Defense Advanced Research Projects Agency - Autonomous ROV/UUV ASV ZZCs DOLPHIN - Quicksilver Controls, special effects robot for filming 'Dolphin Tale' movie about Winter the dolphin amputee DSTL - Defence Science & Technology Laboratory ESPANDON - Swordfish, SLAMF, future mine countermeasures program FishPi - An autonomous boat project to prove Raspberry computer capability for navigation of a vessel for long distances. FUGRO - General Dynamics - Anti submarine warfare USVs Helicopter Drones - Miniature flying machines using open source code HORIZON 2020 - Patent (PCTIB2010055929) Italian ecological propulsion system POD ref: TOIT20130916002 INDAGATUS - Small endurance UMV platform INDIEGOGO - Open Hand Project, 3D printed robotic low cost prosthetics KABUTOM RX3 - Giant robot beetle from Japan, built by Hitoshi Takahashi Kickstarter - Robotboat MK VI autonomous oceanographic wing sailor project Kickstarter - Scout Transatlantic - Microtransat autonomous solar powered trans Atlantic crossing robot project 2013 Kickstarter - Stompy, a US project to build a giant ride on hexapod vehicle LEGO - Mindstorms education robotic invention system, brick computer LEMUSV - Long Endurance Marine Unmanned Surface Vessel LIQUID ROBOTICS - Wave Glider autonomous surface vessels Maritime Robotics - Mariner USV MAST - Maritime Sense & Avoidance Systems for unmanned vessels MASTT - Royal Navy purchases Seebyte smart software for their autonomous underwater trials Sept 2013 MBED - ARM based microcontroller developer platform Microtransat - Competition for autonomous sailing models MIT Cambridge University - Controlling Drone with Mobile Phone MONALISA - Motorways of the Sea, eco-efficient e-navigation solutions contribution to safe maritime transport MOST - Autonomous Vessel Limited - Autonaut USV MUNIN - Maritime Unmanned Navigation through Intelligence in Networks & E-Nav International 7th Framework NAMOS - Networked Aqautic Microbial Observation System using marine robots NAVSEA - Naval Surface Warfare Center - Shipboard energy conservation NERC - UK National Environment Research Council NOC - UK National Oceanographic Centre PICAXE - Microcontroller for robotics projects with open source software support PREDATOR - Robotic submarine hunter-killer OpenROV - Open source underwater robots for exploration and education. OPTICAL RECOGNITION - Latest developments for machine object avoidance Queen's University Belfast - Engineering & Physical Research Council COLREGs & unmanned maritime systems RASPBERRY PI - Low cost educational computer to learn how to program robots, etc. Open source RAYTHEON - Sonar anti-submarine detection equipment Roboboats - Autonomous Surface Boats competition, ASVs Robosubs - Autonomous Underwater Vessel competition AUVs SARUMS - Safety and Regulations for European Unmanned Maritime Systems SBRI - Small Business Research Initiative Sea Robotics - Unmanned systems Slocum sea glider - Doug Webb & Henry Stommel Snoopy Sloop - Robin Lovelock's robot sailing boat: Microtransat Trans-Atlantic competition SPOT - Satellite global tracking system TSB - Technology Strategy Board UK MAS - UK Maritime Autonomous Systems UNDERWATER - Search & salvage - Federal Business Opportunities USNA - Roboboat competition team 2011 & 2012 SOTON - University of Southampton - University Western Australia - USAL robot sub Woods Hole Oceanographic Institution - ABE lost at sea ZYCRAFT - Vigilant unmanned endurance vessel - Anti submarine warfare
LAND BASED ROBOTS
AUTONOMOUS SOLUTIONS INC - Mobius™ vehicle command and control system and Guideline™ robotic convoys 14 in 1 SOLAR ROBOT KIT - A solar powered robot kit for ages 10+ BIROB CHEETAH EPFL - Claimed to be the fastest quadruped robot cat @ June 2013 DARPA - Autonomous land vehicle - Red Bull GIGANTOR & GUNDAM - Giant robot statues, Kobe and Tokyo, Japan GOOGLE - Autonomous robotic cars unveiled May 2014 HUMANOID - University of Aalborg bipedal robot project MANTIS - Giant hydraulic hexapod powered by 2 liter diesel engine - completed UK project ROBOBEE - Harvard microbiotics laboratory project STOMPY - Giant hydraulic hexapod powered by fork lift truck IC gas engine VISLAB - Autonomous car controls, vision (camera & laser) based object recognition system
|
|
|
This
website is copyright © 1991- 2014 Max Energy Ltd. All rights
reserved. The bird logo
|