|

BIPEDAL
ROBOTS For nearly the whole of the 20th century, bipedal robots were very difficult to construct and robot locomotion involved only wheels, treads, or multiple legs. Recent cheap and compact computing power has made two-legged robots more feasible. Some notable biped robots are ASIMO, HUBO and QRIO. Recently, spurred by the success of creating a fully passive, un-powered bipedal walking robot, those working on such machines have begun using principles gleaned from the study of human and animal locomotion, which often relies on passive mechanisms to minimize power consumption. Bipedal robots are becoming the most researched type of robots, with many universities innovating in this field of research; they are also becoming more and more mobile, with some of them being able to run, such as the Raptor, clokced at 28 miles per hour. 
BIPEDALISM Bipedalism is a form of terrestrial locomotion where an organism moves by means of its two rear limbs, or legs. An animal or machine that usually moves in a bipedal manner is known as a biped, meaning "two feet" (from the Latin bi for "two" and ped for "foot"). Types of bipedal movement include walking, running, or hopping, on two appendages (typically legs).
Few modern species are habitual bipeds whose normal method of locomotion is two-legged. Within mammals, habitual bipedalism has evolved multiple times, with the macropods, kangaroo rats and mice, springhare, hopping mice, pangolins and homininan apes, as well as various other extinct groups evolving the trait independently. In the Triassic period some groups of archosaurs (a group that includes the ancestors of crocodiles) developed bipedalism; among their descendants the
dinosaurs, all the early forms and many later groups were habitual or exclusive bipeds; the birds descended from one group of exclusively bipedal dinosaurs.
A larger number of modern species utilise bipedal movement for a short time. Several non-archosaurian lizard species move bipedally when running, usually to escape from threats. Many primate and bear species will adopt a bipedal gait in order to reach food or explore their environment. Several arboreal primate species, such as gibbons and indriids, exclusively utilise bipedal locomotion during the brief periods they spend on the ground. Many animals rear up on their hind legs whilst fighting or copulating. A few animals commonly stand on their hind legs, in order to reach food, to keep watch, to threaten a competitor or predator, or to pose in courtship, but do not move bipedally. ADVANTAGES
Limited and exclusive bipedalism can offer a species several advantages. Bipedalism raises the head; this allows a greater field of vision with improved detection of distant dangers or resources, access to deeper water for wading animals and allows the animals to reach higher food sources with their mouths. While upright, non-locomotory limbs become free for other uses, including manipulation (in primates and rodents), flight (in birds), digging (in giant pangolin), combat (in bears and the large monitor lizard) or camouflage (in certain species of octopus). The maximum bipedal speed appears less fast than the maximum speed of quadrupedal movement with a flexible backbone – the ostrich reaches speeds of 65 km/h (40 mph) and the red kangaroo 70 km/h (43 mph), while the cheetah can exceed 100 km/h (62 mph). Bipedality in kangaroo rats has been hypothesized to improve locomotor performance,[clarification needed] which could aid in escaping from predators.
Movement
There are a number of states of movement commonly associated with bipedalism.
* Standing. Staying still on both legs. In most bipeds this is an active process, requiring constant adjustment of balance.
* Walking. One foot in front of another, with at least one foot on the ground at any time.
* Running. One foot in front of another, with periods where both feet are off the ground.
* Jumping/hopping. Moving by a series of jumps with both feet moving together.
Primates
Most bipedal animals move with their backs close to horizontal, using a long tail to balance the weight of their bodies. The primate version of bipedalism is unusual because the back is close to upright (completely upright in humans). Many primates can stand upright on their hind legs without any support. Chimpanzees, bonobos, gibbons and baboons exhibit forms of bipedalism. Injured chimpanzees and bonobos have been capable of sustained bipedalism. Geladas, although often quadrupedal, will move between adjacent feeding patches with a squatting, shuffling bipedal form of locomotion. Three captive primates, one macaque Natasha and two chimps, Oliver and Poko (chimpanzee), were found to move bipedally[clarification needed]]. Natasha switched to exclusive bipedalism after an illness, while Poko was discovered in captivity in a tall, narrow cage. Oliver reverted to knuckle-walking after developing arthritis.
In addition, non-human primates often use bipedal locomotion when carrying food. One hypothesis for human bipedalism is thus that it evolved as a result of differentially successful survival from carrying food to share with group members, although there are other hypotheses, as discussed below.
EVOLUTION OF BIPEDALISM
There are at least twelve distinct hypotheses as to how and why bipedalism evolved in humans, and also some debate as to when. Bipedalism evolved well before the large human brain or the development of stone tools. Bipedal specializations are found in Australopithecus fossils from 4.2-3.9 million years ago. Recent evidence regarding modern human sexual dimorphism (physical differences between male and female) in the lumbar spine has been seen in pre-modern primates such as Australopithecus africanus. This dimorphism has been seen as an evolutionary adaptation of females to bear lumbar load better during pregnancy, an adaptation that non-bipedal primates would not need to make. The different hypotheses are not necessarily mutually exclusive and a number of selective forces may have acted together to lead to human bipedalism. It is important to distinguish between adaptations for bipedalism and adaptations for running, which came later still.
Possible reasons for the evolution of human bipedalism include freeing the hands for tool use and carrying, sexual dimorphism in food gathering, changes in climate and habitat (from jungle to savanna) that favored a more elevated eye-position, and to reduce the amount of skin exposed to the tropical sun.
Savanna-based theory
According to the savanna-based theory, hominines descended from the trees and adapted to life on the savanna by walking erect on two feet. The theory suggests that early hominids were forced to adapt to bipedal locomotion on the open savanna after they left the trees. In fact, Elizabeth Vrba’s turnover pulse hypothesis supports the savanna-based theory by explaining the shrinking of forested areas due to global warming and cooling, which forced animals out into the open grasslands and caused the need for hominids to acquire bipedality.
Rather, the bipedal adaptation hominines had already achieved was used in the savanna. The fossil record shows that early bipedal hominines were still adapted to climbing trees at the time they were also walking upright. Hominine fossils found in dry grassland environments led anthropologists to believe hominines lived, slept, walked upright, and died only in those environments because no hominine fossils were found in forested areas. However, fossilization is a rare occurrence—the conditions must be just right in order for an organism that dies to become fossilized for somebody to find later, which is also a rare occurrence. The fact that no hominine fossils were found in forests does not ultimately lead to the conclusion that no hominines ever died there. The convenience of the savanna-based theory caused this point to be overlooked for over a hundred years.
Some of the fossils found actually showed that there was still an adaptation to arboreal life. For example, Lucy, the famous Australopithecus afarensis, found in Hadar in Ethiopia, which may have been forested at the time of Lucy’s death, had curved fingers that would still give her the ability to grasp tree branches, but she walked bipedally. “Little Foot,” the collection of Australopithecus africanus foot bones, has a divergent big toe as well as the ankle strength to walk upright. “Little Foot” could grasp things using his feet like an ape, perhaps tree branches, and he was bipedal. Ancient pollen found in the soil in the locations in which these fossils were found suggest that the area used to be covered in thick vegetation and has only recently become the arid desert it is now.
Traveling efficiency hypothesis
An alternative explanation is the mixture of savanna and scattered forests increased terrestrial travel by proto-humans between clusters of trees, and bipedalism offered greater efficiency for long-distance travel between these clusters than quadrupedalism.
Postural feeding hypothesis
The postural feeding hypothesis has been recently supported by Dr. Kevin Hunt, a professor at Indiana University. This hypothesis asserts that chimpanzees were only bipedal when they ate. While on the ground, they would reach up for fruit hanging from small trees and while in trees, bipedalism was utilized by grabbing for an overhead branch. These bipedal movements may have evolved into regular habits because they were so convenient in obtaining food. Also, Hunt hypothesises that these movements coevolved with chimpanzee arm-hanging, as this movement was very effective and efficient in harvesting food. When analyzing fossil anatomy, Australopithecus afarensis has very similar features of the hand and shoulder to the chimpanzee, which indicates hanging arms. Also, the Australopithecus hip and hind limb very clearly indicate bipedalism, but these fossils also indicate very inefficient locomotive movement when compared to humans. For this reason, Hunt argues that bipedalism evolved more as a terrestrial feeding posture than as a walking posture.
Provisioning model
One theory on the origin of bipedalism is the behavioral model presented by C. Owen Lovejoy, known as "male provisioning". Lovejoy theorizes that the evolution of bipedalism was linked to monogamy. In the face of long inter-birth intervals and low reproductive rates typical of the apes, early hominids engaged in pair-bonding that enabled greater parental effort directed towards rearing offspring. Lovejoy proposes that male provisioning of food would improve the offspring survivorship and increase the pair's reproductive rate. Thus the male would leave his mate and offspring to search for food and return carrying the food in his arms walking on his legs. This model is supported by the reduction ("feminization") of the male canine teeth in early hominids such as Sahelanthropus tchadensis and Ardipithecus ramidus, which along with low body size dimorphism in Ardipithecus and Australopithecus, suggests a reduction in inter-male antagonistic behavior in early hominids. In addition, this model is supported by a number of modern human traits associated with concealed ovulation (permanently enlarged breasts, lack of sexual swelling) and low sperm competition (moderate sized testes, low sperm mid-piece volume) that argues against recent adaptation to a polygynous reproductive system.
However, this model has generated some controversy, as others have argued that early bipedal hominids were instead polygynous. Among most monogamous primates, males and females are about the same size. That is sexual dimorphism is minimal, and other studies have suggested that Australopithecus afarensis males were nearly twice the weight of females. However, Lovejoy's model posits that the larger range a provisioning male would have to cover (to avoid competing with the female for resources she could attain herself) would select for increased male body size to limit predation risk. Furthermore, as the species became more bipedal, specialized feet would prevent the infant from conveniently clinging to the mother - hampering the mother's freedom[44] and thus make her and her offspring more dependent on resources collected by others. Modern monogamous primates such as gibbons tend to be also territorial, but fossil evidence indicates that Australopithecus afarensis lived in large groups. However, while both gibbons and hominids have reduced canine sexual dimorphism, female gibbons enlarge ('masculinize') their canines so they can actively share in the defense of their home territory. Instead, the reduction of the male hominid canine is consistent with reduced inter-male aggression in a group living primate.
Early bipedalism in homininae model
Recent studies of 4.4 million years old Ardipithecus ramidus suggest bipedalism, it is thus possible that bipedalism evolved very early in homininae and was reduced in chimpanzee and gorilla when they became more specialized. According to Richard Dawkins in his book "The Ancestor's Tale", chimps and bonobos are descended from Australopithecus gracile type species while gorillas are descended from Paranthropus. These apes may have once been bipedal, but then lost this ability when they were forced back into an arboreal habitat, presumably by those australopithecines who eventually became us (see Homininae). Early homininaes such as Ardipithecus ramidus may have possessed an arboreal type of bipedalism that later independently evolved towards knuckle-walking in chimpanzees and gorillas and towards efficient walking and running in modern humans (see figure). It is also proposed that one cause of Neanderthal extinction was a less efficient running.
Warning display (aposematic) model
Joseph Jordania from the University of Melbourne recently (2011) suggested that bipedalism was one of the central elements of the general defense strategy of early hominids, based on aposematism, or warning display and intimidation of potential predators and competitors with exaggerated visual and audio signals. According to this model, hominids were trying to stay as visible and as loud as possible all the time. Several morphological and behavioral developments were employed to achieve this goal: upright bipedal posture, longer legs, long tightly coiled hair on the top of the head, body painting, threatening synchronous body movements, loud voice and extremely loud rhythmic singing/stomping/drumming on external subjects. Slow locomotion and strong body odor (both characteristic for hominids and humans) are other features often employed by aposematic species to advertise their non-profitability for potential predators.
Other behavioural models
There are a variety of ideas which promote a specific change in behaviour as the key driver for the evolution of hominid bipedalism. For example, Wescott (1967) and later Jablonski & Chaplin (1993) suggest that bipedal threat displays could have been the transitional behaviour which led to some groups of apes beginning to adopt bipedal postures more often. Others (e.g. Dart 1925) have offered the idea that the need for more vigilance against predators could have provided the initial motivation. Dawkins (e.g. 2004) has argued that it could have begun as a kind of fashion that just caught on and then escalated through sexual selection. And it has even been suggested (e.g. Tanner 1981:165) that male phallic display could have been the initial incentive.
Thermoregulatory model
The thermoregulatory model explaining the origin of bipedalism is one of the simplest theories so far advanced, but it is a viable explanation. Dr. Peter Wheeler, a professor of evolutionary biology, proposes that bipedalism raises the amount of body surface area higher above the ground which results in a reduction in heat gain and helps heat dissipation. When a hominid is higher above the ground, the organism accesses more favorable wind speeds and temperatures. During heat seasons, greater wind flow results in a higher heat loss, which makes the organism more comfortable. Also, Wheeler explains that a vertical posture minimizes the direct exposure to the sun whereas quadrupedalism exposes more of the body to direct exposure. Analysis and interpretations of Ardipithecus reveal that this hypothesis needs modification to consider that the forest and woodland environmental preadaptation of early-stage hominid bipedalism preceded further refinement of bipedalism by the pressure of natural selection. This then allowed for the more efficient exploitation of the hotter conditions ecological niche, rather than the hotter conditions being hypothetically bipedalism's initial stimulus.
Carrying models
Charles Darwin wrote that "Man could not have attained his present dominant position in the world without the use of his hands, which are so admirably adapted to the act of obedience of his will" Darwin (1871:52) and many models on bipedal origins are based on this line of thought. Gordon Hewes (1961) suggested that the carrying of meat "over considerable distances" (Hewes 1961:689) was the key factor. Isaac (1978) and Sinclair et al. (1986) offered modifications of this idea as indeed did Lovejoy (1981) with his 'provisioning model' described above. Others, such as Nancy Tanner (1981) have suggested that infant carrying was key, whilst others have suggested stone tools and weapons drove the change.
Wading models
Several theories have been proposed regarding the influence of water on human bipedalism. The aquatic ape hypothesis, promoted for several decades by Elaine Morgan, proposed that swimming, diving and aquatic food sources exerted a strong influence on many aspects of human evolution, including
bipedalism. It is not accepted by or considered a serious theory within the anthropological scholarly community. Others, however, cite bipedalism among a cluster of other adaptations unique among primates, including voluntary control of breathing, hairlessness, subcutaneous fat and several other traits that are difficult to explain with more conventional theories.
Other theories have been proposed that suggest wading and the exploitation of aquatic food sources (providing essential nutrients for human brain evolution or critical fallback foods) may have exerted evolutionary pressures on human ancestors promoting adaptations which later assisted full-time bipedalism.

BIOMECHANICS
Standing
Energy-efficient means of standing bipedally involve constant adjustment of balance, and of course these must avoid overcorrection. The difficulties associated with simple standing in upright humans are highlighted by the greatly increased risk of falling present in the elderly, even with minimal reductions in control system effectiveness.
Walking
Walking is characterized by an "inverted pendulum" movement in which the center of gravity vaults over a stiff leg with each step. Force plates can be used to quantify the whole-body kinetic & potential energy, with walking displaying an out-of-phase relationship indicating exchange between the two. Interestingly, this model applies to all walking organisms regardless of the number of legs, and thus bipedal locomotion does not differ in terms of whole-body kinetics.
In humans, walking is composed of several separate processes:
1. Vaulting over a stiff stance leg
2. Passive ballistic movement of the swing leg
3. A short 'push' from the ankle prior to toe-off, propelling the swing leg
4. Rotation of the hips about the axis of the spine, to increase stride length
5. Rotation of the hips about the horizontal axis to improve balance during stance.
Running
Running is characterized by a spring-mass movement. Kinetic and potential energy are in phase, and the energy is stored & released from a spring-like limb during foot contact. Again, the whole-body kinetics are similar to animals with more limbs.

ROBOTICS In
robotics bipedalism raises the stakes with balance control being a
necessary function if the robot is to emulate the human
form. This may not be necessary, but more of an aesthetic target,
I know it was for me. Robots with all the advantages of bipeds can be
built that avoid the need for intricate balance (which absorbs energy)
with balance control being more for awareness and targeting. For nearly the whole of the 20th century, bipedal robots were very difficult to construct and robot locomotion involved only wheels, treads, or multiple legs. Recent cheap and compact computing power has made two-legged robots more feasible. Some notable biped robots are ASIMO, HUBO and QRIO. Recently, spurred by the success of creating a fully passive, un-powered bipedal walking robot, those working on such machines have begun using principles gleaned from the study of human and animal locomotion, which often relies on passive mechanisms to minimize power consumption. Bipedal robots are becoming the most researched type of robots, with many universities innovating in this field of research; they are also becoming more and more mobile, with some of them being able to
run.
Besides research into the development of humans, humanoid robots are being developed to perform human tasks like personal assistance, where they should be able to assist the sick and elderly, and dirty or dangerous jobs. Regular jobs like being a receptionist or a worker of an automotive manufacturing line are also suitable for humanoids. In essence, since they can use tools and operate equipment and vehicles designed for the human form, humanoids could theoretically perform any task a human being can, so long as they have the proper software. However, the complexity of doing so is deceptively great.
They are becoming increasingly popular for providing entertainment too. For example, Ursula, a female robot, sings, play music, dances, and speaks to her audiences at Universal Studios. Several Disney attractions employ the use of animatrons, robots that look, move, and speak much like human beings, in some of their theme park shows. These animatrons look so realistic that it can be hard to decipher from a distance whether or not they are actually human. Although they have a realistic look, they have no cognition or physical autonomy. Various humanoid robots and their possible applications in daily life are featured in an independent documentary film called Plug & Pray, which was released in 2010.
Humanoid robots, especially with artificial intelligence algorithms, could be useful for future dangerous and/or distant space exploration missions, without having the need to turn back around again and return to Earth once the mission is completed.
|
Year
|
Development
|
|
c.
250 BC
|
The
Lie
Zi described an automaton.
|
|
c.
50 AD
|
Greek
mathematician Hero
of Alexandria described a machine to automatically
pour wine for party guests.
|
|
1206
|
Al-Jazari
described a band made up of humanoid automata which,
according to Charles B. Fowler, performed "more
than fifty facial and body actions during each musical
selection." Al-Jazari also created hand
washing automata
with automatic humanoid servants and an elephant
clock incorporating an automatic humanoid mahout
striking a cymbal on the half-hour. His programmable
"castle clock" also featured five musician
automata which automatically played music when moved by
levers operated by a hidden camshaft
attached to a water
wheel.
|
|
1495
|
Leonardo
da Vinci designs a humanoid automaton
that looks like an armored knight, known as Leonardo's
robot.
|
|
1738
|
Jacques
de Vaucanson builds The Flute Player, a life-size
figure of a shepherd that could play twelve songs on the
flute and The Tambourine Player that played a flute and
a drum or tambourine.
|
|
1774
|
Pierre
Jacquet-Droz and his son Henri-Louis created the
Draughtsman, the Musicienne and the Writer, a figure of
a boy that could write messages up to 40 characters
long.
|
|
1898
|
Nikola
Tesla publicly demonstrates his "automaton"
technology by wirelessly controlling a model boat at the
Electrical Exposition held at Madison Square Garden in
New York City during the height of the
Spanish–American War.
|
|
1921
|
Czech
writer Karel
Čapek introduced the word "robot" in
his play R.U.R.
(Rossum's Universal Robots). The word
"robot" comes from the word "robota",
meaning, in Czech and Polish, "forced labour,
drudgery".
|
|
1927
|
The
Maschinenmensch
(“machine-human”), a gynoid
humanoid robot, also called "Parody", "Futura",
"Robotrix", or the "Maria
impersonator" (played by German actress Brigitte
Helm), perhaps the most memorable humanoid robot
ever to appear on film, is depicted in Fritz
Lang's film
Metropolis.
|
|
1941-42
|
Isaac
Asimov formulates the Three
Laws of Robotics, and in the process of doing so,
coins the word "robotics".
|
|
1948
|
Norbert
Wiener formulates the principles of cybernetics,
the basis of practical robotics.
|
|
1961
|
The
first digitally operated and programmable non-humanoid
robot, the Unimate,
is installed on a General
Motors assembly
line to lift hot pieces of metal from a die casting
machine and stack them. It was created by George
Devol and constructed by Unimation,
the first robot manufacturing company.
|
|
1969
|
D.E.
Whitney publishes his article "Resolved motion rate
control of manipulators and human prosthesis".
|
|
1970
|
Miomir
Vukobratović has proposed Zero
Moment Point, a theoretical model to explain biped
locomotion.
|
|
1972
|
Miomir
Vukobratović and his associates at Mihajlo
Pupin Institute build the first active
anthropomorphic exoskeleton.
|
|
1973
|
In
Waseda
University, in Tokyo, Wabot-1 is built. It was able
to walk, to communicate with a person in Japanese and to
measure distances and directions to the objects using
external receptors, artificial ears and eyes, and an
artificial mouth.
|
|
1980
|
Marc
Raibert established the MIT Leg Lab, which is dedicated
to studying legged locomotion and building dynamic
legged robots.
|
|
1983
|
Using
MB Associates arms, "Greenman" was developed
by Space and Naval Warfare Systems Center, San Diego. It
had an exoskeletal master controller with kinematic
equivalency and spatial correspondence of the torso,
arms, and head. Its vision system consisted of two
525-line video cameras each having a 35-degree field of
view and video camera eyepiece monitors mounted in an
aviator's helmet.
|
|
1984
|
At
Waseda
University, the Wabot-2 is created, a musician
humanoid robot able to communicate with a person, read a
normal musical score with his eyes and play tunes of
average difficulty on an electronic organ.
|
|
1985
|
Developed
by Hitachi Ltd, WHL-11 is a biped robot capable of
static walking on a flat surface at 13 seconds per step
and it can also turn.
|
|
1985
|
WASUBOT
is another musician robot from Waseda University. It
performed a concerto with the NHK Symphony Orchestra at
the opening ceremony of the International Science and
Technology Exposition.
|
|
1986
|
Honda
developed seven biped robots which were designated E0
(Experimental Model 0) through E6. E0 was in 1986, E1
– E3 were done between 1987 and 1991, and E4 - E6 were
done between 1991 and 1993.
|
|
1989
|
Manny
was a full-scale anthropomorphic robot with 42 degrees
of freedom developed at Battelle's Pacific Northwest
Laboratories in Richland, Washington, for the US Army's
Dugway Proving Ground in Utah. It could not walk on its
own but it could crawl, and had an artificial
respiratory system to simulate breathing and sweating.
|
|
1990
|
Tad
McGeer showed that a biped mechanical structure with
knees could walk passively down a sloping surface.
|
|
1993
|
Honda
developed P1 (Prototype Model 1) through P3, an
evolution from E series, with upper limbs. Developed
until 1997.
|
|
1995
|
Hadaly
was developed in Waseda
University to study human-robot communication and
has three subsystems: a head-eye subsystem, a voice
control system for listening and speaking in Japanese,
and a motion-control subsystem to use the arms to point
toward campus destinations.
|
|
1995
|
Wabian
is a human-size biped walking robot from Waseda
University.
|
|
1996
|
Saika,
a light-weight, human-size and low-cost humanoid robot,
was developed at Tokyo University. Saika has a two-DOF
neck, dual five-DOF upper arms, a torso and a head.
Several types of hands and forearms are under
development also. Developed until 1998.
|
|
1997
|
Hadaly-2,
developed at Waseda
University, is a humanoid robot which realizes
interactive communication with humans. It communicates
not only informationally, but also physically.
|
|
2000
|
Honda
creates its 11th bipedal humanoid robot, able to run, ASIMO.
|
|
2001
|
Sony
unveils small humanoid entertainment robots, dubbed Sony
Dream Robot (SDR). Renamed Qrio
in 2003.
|
|
2001
|
Fujitsu
realized its first commercial humanoid robot named
HOAP-1. Its successors HOAP-2 and HOAP-3 were announced
in 2003 and 2005, respectively. HOAP
is designed for a broad range of applications for
R&D of robot technologies.
|
|
2002
|
HRP-2,
biped walking robot built by the Manufacturing Science
and Technology Center (MSTC) in Tokyo.
|
|
2003
|
JOHNNIE,
an autonomous biped walking robot built at the Technical
University of Munich. The main objective was to
realize an anthropomorphic walking machine with a
human-like, dynamically stable gait
|
|
2003
|
Actroid,
a robot with realistic silicone "skin"
developed by Osaka
University in conjunction with Kokoro Company Ltd.
|
|
2004
|
Persia,
Iran's first humanoid robot, was developed using
realistic simulation by researchers of Isfahan
University of Technology in conjunction with ISTT.
|
|
2004
|
KHR-1,
a programmable bipedal humanoid robot introduced in June
2004 by a Japanese
company Kondo Kagaku.
|
|
2005
|
The
PKD Android, a conversational humanoid robot made in the
likeness of science fiction novelist Philip K Dick, was
developed as a collaboration between Hanson
Robotics, the FedEx
Institute of Technology, and the University
of Memphis.
|
|
2005
|
Wakamaru,
a Japanese domestic robot made by Mitsubishi Heavy
Industries, primarily intended to provide companionship
to elderly and disabled people.
|
|
2005
|
Nao
is a small open source programmable humanoid robot
developed by Aldebaran Robotics, in France. Widely used
by world wide universities as a research platform and
educational tool.
|
|
2005
|
The
Geminoid series is a series of ultra-realistic humanoid
robots or Actroid
developed by Hiroshi
Ishiguro of ATR and Kokoro in Tokyo. The original
one, Geminoid HI-1 was made at its image. Followed
Geminoid-F in 2010 and Geminoid-DK in 2011.
|
|
2006
|
RoboTurk
is designed and realized by Dr Davut Akdas and Dr Sabri
Bicakci at Balikesir University. This Research Project
Sponsored By The Scientific And Technological Research
Council Of Turkey (TUBITAK)
in 2006. RoboTurk is successor of biped robots named
"Salford
Lady" and "Gonzalez" at university of
Salford in the UK. It is the first humanoid robot
supported by Turkish Government.
|
|
2006
|
REEM-A,
a biped humanoid robot designed to play chess with the Hydra
Chess engine. The first robot developed by PAL
Robotics, it was also used as a walking, manipulation
speech and vision development platform.
|
|
2006
|
iCub,
a biped humanoid open source robot for cognition
research.
|
|
2006
|
Mahru,
a network-based biped humanoid robot developed in South
Korea.
|
|
2007
|
TOPIO,
a ping pong playing robot developed by TOSY Robotics JSC.
|
|
2007
|
Twendy-One,
a robot developed by the WASEDA University Sugano
Laboratory for home assistance services. It is not
biped, as it uses an omni-directional mobile mechanism.
|
|
2008
|
Justin,
a humanoid robot developed by the German
Aerospace Center (DLR).
|
|
2008
|
KT-X,
the first international humanoid robot developed as a
collaboration between the five-time consecutive RoboCup
champions, Team Osaka, and KumoTek Robotics.
|
|
2008
|
Nexi,
the first mobile, dexterous and social robot, makes its
public debut as one of TIME magazine's top
inventions of the year. The robot was built through a
collaboration between the MIT Media Lab Personal Robots
Group, UMass Amherst and Meka
robotics.
|
|
2008
|
Salvius
(robot), The first open source humanoid robot built
in the United States is created.
|
|
2008
|
REEM-B,
the second biped humanoid robot developed by PAL
Robotics. It has the ability to autonomously learn its
environment using various sensors and carry 20% of its
own weight.
|
|
2009
|
HRP-4C,
a Japanese domestic robot made by National
Institute of Advanced Industrial Science and Technology,
shows human characteristics in addition to bipedal
walking.
|
|
2009
|
Turkey's
first dynamically walking humanoid robot, SURALP, is
developed by Sabanci
University in conjunction with Tubitak.
|
|
2009
|
Kobian,
a robot developed by WASEDA University can walk, talk
and mimic emotions.
|
|
2010
|
NASA
and General Motors revealed Robonaut
2, a very advanced humanoid robot. It was part of
the payload of Shuttle Discovery on the successful
launch February 24, 2011. It is intended to do
spacewalks for NASA.
|
|
2010
|
Students
at the University
of Tehran, Iran
unveil the Surena
II. It was unveiled by President Mahmoud
Ahmadinejad.
|
|
2010
|
Researchers
at Japan's National
Institute of Advanced Industrial Science and Technology
demonstrate their humanoid robot HRP-4C
singing and dancing along with human dancers.
|
|
2010
|
In
September the National Institute of Advanced Industrial
Science and Technology also demonstrates the humanoid
robot HRP-4. The HRP-4 resembles the HRP-4C in some
regards but is called "athletic" and is not a
gynoid.
|
|
2010
|
REEM,
a humanoid service robot with a wheeled mobile base.
Developed by PAL Robotics, it can perform autonomous
navigation in various surroundings and has voice and
face recognition capabilities.
|
|
2011
|
In
November Honda unveiled its second generation Honda
Asimo Robot. The all new Asimo is the first version of
the robot with semi-autonomous capabilities.
|
|
2012
|
In
April, the Advanced Robotics Department in Italian
Institute of Technology released its first version of
the COmpliant huMANoid robot COMAN which
is designed for robust dynamic walking and balancing in
rough terrain.
|
|
2013
|
In
December 20–21, 2013 DARPA Robotics Challenge ranked
the top 16 humanoid robots competing for the $2 million
cash prize. The leading team, SCHAFT, with 27 out of a
possible score of 30 was bought by Google. PAL
Robotics launches REEM-C
the first humanoid biped robot developed as a robotics
research platform 100% ROS
based.
|
|
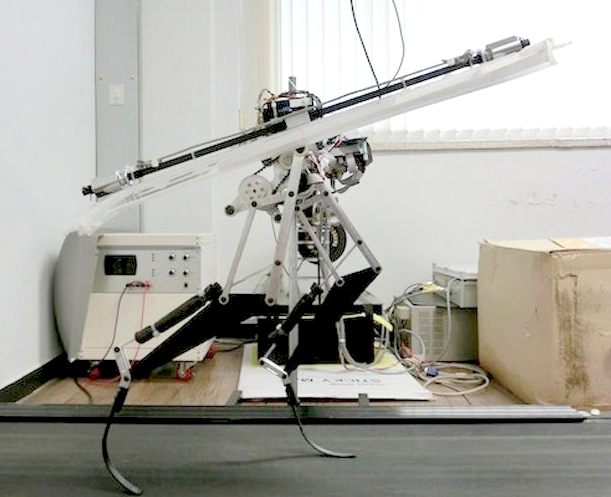
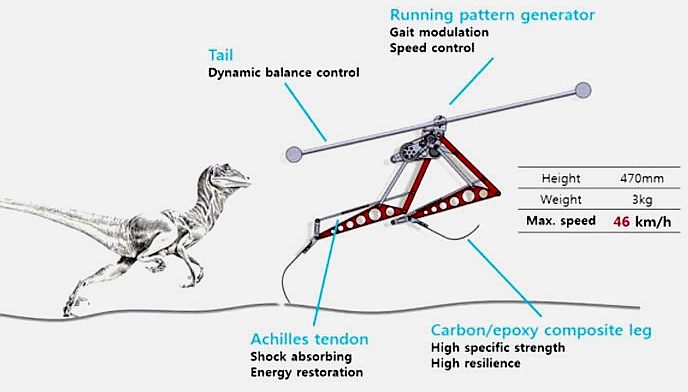
The Raptor, a bipedal robot that can run extremely
fast but is not yet self-contained (stand alone). Regardless, it is a
step (or two) in the right direction.
THE
RAPTOR Raptor is a bipedal robot which was designed and conceived in 2014 by the Korea Advanced Institute of Science and Technology (KAIST). It has a top speed of 28.58 miles per hour, making it the second fastest robot after the Cheeath, and the fastest bipedal robot worldwide. Designers at the KAIST took their inspiration from the Velociraptor, a bipedal dinosaur which balances itself with its tail. The robot moves itself with a pair of carbon-fibre
blade legs. And it's fast. Running on its two legs, the Raptor has been clocked in at 46kph (28.5mPH) on a treadmill. That's faster than
Usain
Bolt, the fastest known human, whose recorded top speed is 44.72 kph (27.44
mph).
BIPEDS
| HEXAPODS | OCTOPODS
| QUADRUPEDS | TRIPODS
REFERENCE
& LINKS
http://www.cnet.com/news/velociraptor-robot-nearly-as-fast-as-cheetah/
http://www.actionfigurepics.com/tag/robocop
http://en.wikipedia.org/wiki/Bipedalism
http://www.ros.org/
http://en.wikipedia.org/wiki/Humanoid_robot
http://www.youtube.com/watch?v=lPEg83vF_Tw http://www.cnet.com/uk/news/velociraptor-robot-nearly-as-fast-as-cheetah/
Biological
Cybernetics/Theoretical Biology
Poly-pedal
Laboratory at Berkeley
Hexapod
project at the University of Applied Sciences of UA at Hagenberg
Bluebird Marine Systems' autonomous robotic ship design. A truly
autonomous robot intended to replace battleships and submarines, to keep
the peace at sea via persistent monitoring and where necessary, drone
control of weapon systems.
WATERBORNE
(MARINE) ROBOTS
ACORE
- American Council on Renewable Energy
ASV
Global - C-Worker
unmanned surface vessel for safer offshore surveys
AUTONAUT
- MOST (Autonomous Vessels) Limited - wave propelled system
AUVSI
- ROBOBOATS
- Association for Unmanned Vehicle Systems International
ARDUINO
- Hobbyists computer platform for interactive robots and machine
prototyping - Open source
ARM
Holdings Plc -
BAE
Systems - Maritime, Naval
ships and submarines
BEAGLEBONE
- ARM low cost robot friendly, low drain micro computer
BLUEBIRD
- Electronics -
BLUEFIN
Robotics -
BLUEFISH
ZCC - Bluebird Marine Systems' autonomous unmanned fleet development
program
BLUE
OCEAN - Rolls Royce autonomous
cargo vessels project
Captain
Kidd's robot sailboat project -
Microtransat
CDE
- Centre for Defence Enterprise
CMTI
- Centre for Maritime
Technology and Innovation - Autonomous Study
DARPA
- Defense Advanced Research Projects Agency - Autonomous
ROV/UUV ASV ZZCs
DOLPHIN
- Quicksilver Controls, special effects robot for filming 'Dolphin Tale'
movie about Winter the dolphin amputee
DSTL
- Defence Science & Technology Laboratory
ESPANDON
- Swordfish, SLAMF, future mine countermeasures program
FishPi
- An autonomous boat project to prove
Raspberry computer capability for navigation of a vessel for long
distances.
FUGRO
-
General
Dynamics - Anti submarine warfare USVs
Helicopter
Drones - Miniature flying machines using open source code
HORIZON
2020 - Patent (PCTIB2010055929) Italian ecological propulsion system POD
ref: TOIT20130916002
INDAGATUS
- Small endurance UMV platform
INDIEGOGO
- Open
Hand Project, 3D printed robotic low cost prosthetics
KABUTOM
RX3 - Giant robot beetle from
Japan, built by Hitoshi Takahashi
Kickstarter
- Robotboat MK VI autonomous oceanographic wing sailor project
Kickstarter
- Scout
Transatlantic - Microtransat autonomous solar powered trans Atlantic
crossing robot project 2013
Kickstarter
- Stompy, a US project to build a giant ride on hexapod vehicle
LEGO
- Mindstorms education robotic invention system, brick computer
LEMUSV
- Long Endurance Marine Unmanned Surface Vessel
LIQUID
ROBOTICS - Wave Glider
autonomous surface vessels
Maritime
Robotics - Mariner
USV
MAST
- Maritime Sense & Avoidance Systems for unmanned vessels
MASTT
- Royal Navy purchases Seebyte smart software for their autonomous
underwater trials Sept 2013
MBED
- ARM based microcontroller developer platform
Microtransat
- Competition for autonomous sailing models
MIT
Cambridge University -
Controlling Drone with Mobile Phone
MONALISA
- Motorways of the Sea, eco-efficient e-navigation
solutions contribution to safe maritime transport
MOST
- Autonomous Vessel Limited - Autonaut
USV
MUNIN
- Maritime
Unmanned Navigation through Intelligence in Networks & E-Nav
International 7th Framework
NAMOS
- Networked Aqautic Microbial Observation System using marine robots
NAVSEA
- Naval Surface Warfare Center - Shipboard energy conservation
NERC
- UK National Environment Research Council
NOC
- UK National Oceanographic Centre
PICAXE
- Microcontroller for robotics projects with open source software
support
PREDATOR
- Robotic submarine hunter-killer
OpenROV
- Open source underwater robots for
exploration and education.
OPTICAL
RECOGNITION - Latest developments for machine object avoidance
Queen's
University Belfast - Engineering & Physical Research Council
COLREGs & unmanned maritime systems
RASPBERRY
PI - Low cost educational computer to learn how to program robots,
etc. Open source
RAYTHEON
- Sonar anti-submarine detection equipment
Roboboats
- Autonomous Surface Boats competition, ASVs
Robosubs
- Autonomous Underwater Vessel competition AUVs
SARUMS
- Safety and Regulations for European Unmanned Maritime Systems
SBRI
- Small Business Research Initiative
Sea
Robotics - Unmanned systems
Slocum
sea glider - Doug Webb &
Henry Stommel
Snoopy
Sloop - Robin Lovelock's robot
sailing boat: Microtransat Trans-Atlantic competition
SPOT
- Satellite global tracking system
TSB
- Technology Strategy Board
UK
MAS - UK Maritime Autonomous
Systems
UNDERWATER
- Search
& salvage - Federal Business Opportunities
USNA
- Roboboat competition team 2011 & 2012
University
of Newcastle -
SOTON
- University of Southampton -
University
Western Australia - USAL robot
sub
Woods
Hole Oceanographic Institution
- ABE lost at sea
ZYCRAFT
- Vigilant unmanned endurance vessel - Anti submarine warfare
LAND
BASED ROBOTS
AUTONOMOUS
SOLUTIONS INC - Mobius™ vehicle command and control system and
Guideline™ robotic convoys
14
in 1 SOLAR ROBOT KIT - A solar
powered robot kit for ages 10+
BIPEDS
BIROB
CHEETAH EPFL - Claimed to be
the fastest quadruped robot cat @ June 2013
CYBEE
DARPA
- Autonomous land vehicle - Red
Bull
GIGANTOR
& GUNDAM - Giant robot statues, Kobe and Tokyo, Japan
GOOGLE
- Autonomous robotic cars unveiled May 2014
HEXAPODS
HUMANOID
- University of Aalborg bipedal robot project
MANTIS
- Giant hydraulic hexapod powered by 2 liter diesel engine - completed
UK project
OCTOPODS
QUADRUPEDS
ROBOBEE
- Harvard microbiotics laboratory project
ROBOT
ANT
SPIDERBOT
STOMPY
- Giant hydraulic hexapod powered by fork lift truck IC gas engine
TRIPODS
VISLAB
- Autonomous car controls, vision (camera & laser) based object
recognition system
|